We will draw your thought in the sky with drones. Tell us your thought.
The long-endurance UAV did a 1 hour and 4 minutes flight.
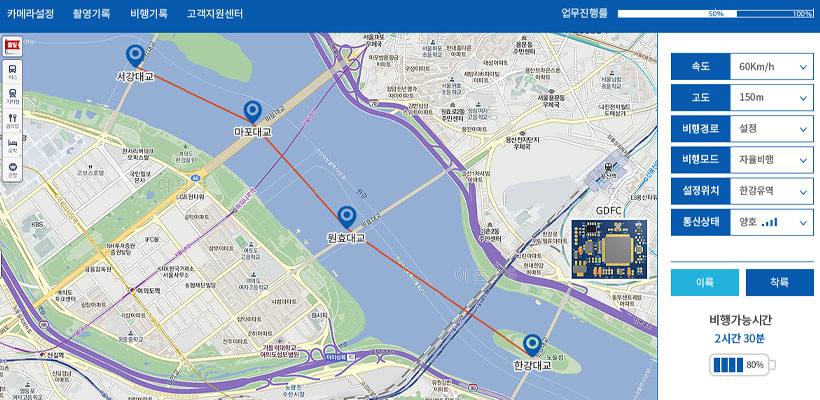
Development of real-time collision avoidance solution by linking LiDAR and FCS
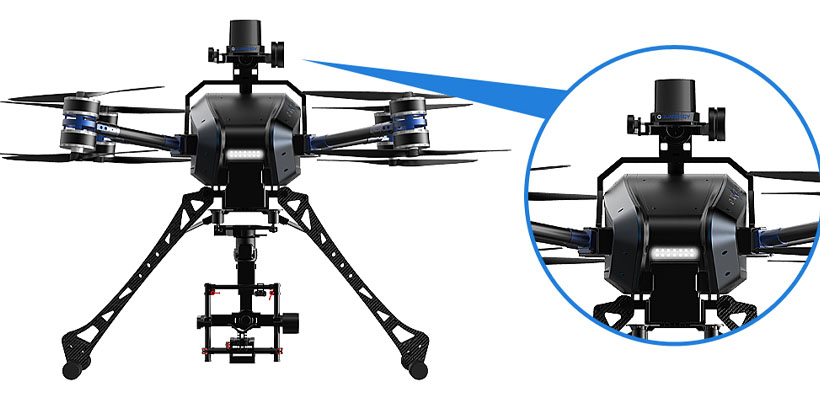
Suppresses vibration during flight and provides high-accuracy survey information
The multi-purpose commercial drone manufactured by the Giantdrone Co., Ltd.
Giantdrone Co., Ltd will lead the new paradigm of drone technology
Need more information about us?
 Suppresses vibration during flight and provides high-accuracy survey information
Suppresses vibration during flight and provides high-accuracy survey information














 We will draw your thought in the sky with drones.
We will draw your thought in the sky with drones. The long-endurance UAV did a 1 hour and 4 minutes flight.
The long-endurance UAV did a 1 hour and 4 minutes flight. Development of real-time collision avoidance solution by linking LiDAR and FCS
Development of real-time collision avoidance solution by linking LiDAR and FCS